随着工业自动化技术的快速发展,传统定位方法已经无法满足日益增长的定位精度、实时性和环境适应性需求。惯性导航定位技术作为一种高精度、实时、自主定位的方法,逐渐在工业自动化生产领域中得到广泛应用。本文将对上海寻位科技惯性导航定位技术(https://www.seekloca.com/)在工业自动化生产过程中的应用浅析。
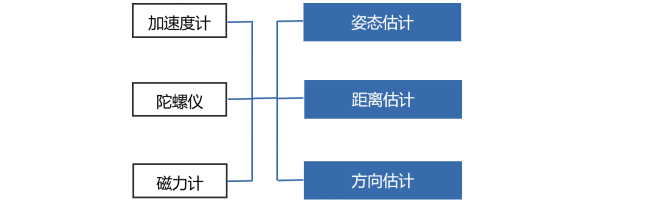
惯性导航系统(INS)是一种基于惯性测量装置(IMU)的自主定位系统。IMU是一种集成了陀螺仪和加速度计的测量装置,用于测量载体的角速度和线性加速度。通过对IMU输出的角速度和加速度进行积分计算,可以得到载体的姿态、速度和位置信息。
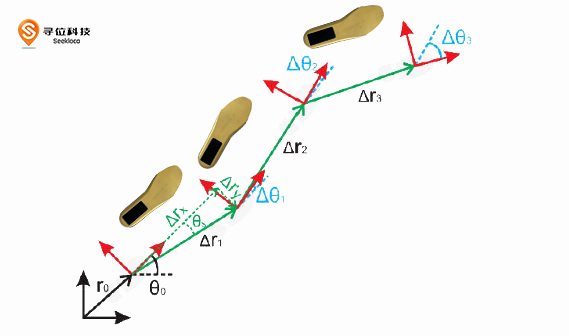
在 INS 中,陀螺仪用于测量载体的角速度,加速度计用于测量载体在各个方向上的线性加速度。这些数据经过解算,可以得到载体的姿态、速度和位置信息。由于 INS 是一种完全自主的定位技术,不需要依赖外部信号,因此具有较高的实时性和环境适应性。
3. 惯性导航定位技术关键技术
3.1 陀螺仪
陀螺仪是惯性导航系统的核心器件之一,用于测量载体的角速度。根据工作原理,陀螺仪可分为机械陀螺仪、光学陀螺仪、振动陀螺仪等。随着微电子和微机械技术的发展,微机电系统(MEMS)陀螺仪逐渐成为工业自动化生产中的主流选择,因为其具有体积小、重量轻、低功耗和低成本的优势。
3.2 加速度计
加速度计是另一种关键的惯性测量器件,用于测量载体在各个方向上的线性加速度。加速度计的种类繁多,包括机械加速度计、电容式加速度计、压阻式加速度计等。在工业自动化生产中,MEMS加速度计具有广泛的应用前景,因其具备低成本、低功耗、高可靠性等优点。
3.3 惯性导航定位算法
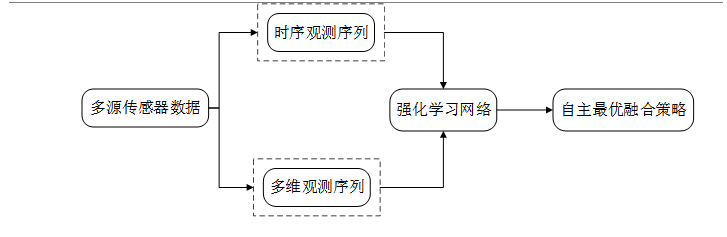
惯性导航定位算法是 INS 的核心技术之一,负责根据角速度和加速度数据计算载体的姿态、速度和位置信息。常见的算法有卡尔曼滤波算法、扩展卡尔曼滤波算法、无迹卡尔曼滤波算法等。随着计算能力的提高和人工智能技术的发展,深度学习方法在惯性导航定位算法中的应用逐渐成为研究热点,如卷积神经网络(CNN)、循环神经网络(RNN)等。
4.1 无人搬运车定位
在工业自动化生产线中,无人搬运车(AGV)已广泛应用于货物的搬运和分拣任务。利用惯性导航定位技术,AGV可以实现高精度、实时的自主定位,有效提高了搬运效率和准确性。
4.2 工业机器人定位与控制
工业机器人在自动化生产过程中起着关键作用。借助惯性导航定位技术,可以实现对机器人末端执行器的精确定位和控制,进而提高生产效率和产品质量。
4.3 仓储物流管理
在仓储物流管理中,惯性导航定位技术可以应用于货物的追踪与管理,实现对货物的实时监督和精确定位,从而降低库存成本、提高库存周转率。

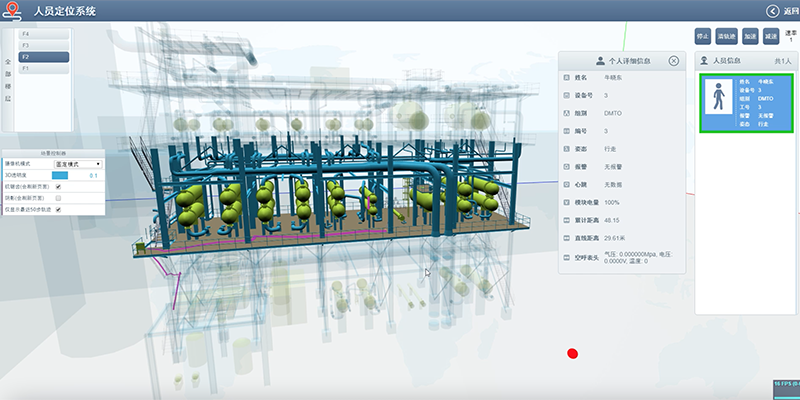
4.4 工业生产环境监测
惯性导航定位技术还可用于工业生产环境的监测。通过部署搭载惯性导航系统的移动监测设备,可以对生产现场的环境参数进行实时监测和分析,为生产过程提供数据支持。